









































正反转双通道转速传感器
- 工作电源:Ub=15VDC±30% (8V~28V)
- 功耗电流:≤35mA
- 工作温度:-40℃~125℃(头部)
- 耐振性能:振动(10Hz~2KHz)30g,冲击100g
- 密封性:IP6813.
- 绝缘强度:1000V 50Hz,1min(通道与外壳)

正反转双通道转速传感器与被测齿轮不接触,无磨损,安装方便,输出波形是占空比约为50%左右的方波。该传感器具备良好的低频和高频特性。低频可至0Hz,可用于旋转机械的零转速测量,由于传感器可给出两路具有一定相位差的转速信号,因此可进行正反转判别;高频可高至20KHz, 可满足绝大部分工业领域的高转速测量要求。

| 工作电源 | Ub=15VDC±30% (8V~28V) |
| 功耗电流 | ≤35mA |
| 工作温度 | -40℃~125℃(头部) |
| 耐振性能 | 振动(10Hz~2KHz)30g,冲击100g |
| 密封性 | IP6813. |
| 电源极性保护 | 有 |
| 输出短路保护 | 有 |
| 绝缘强度 | 1000V 50Hz,1min(通道与外壳) |
反转转速传感器用于检测轮轴的转速和线速度,通过计算处理也可得到被测体的速度。该传感器具备良好的低频和高频特性。低频可至0Hz,用于旋转机械的零转速量,高至20KHz,可满足绝大部分工业领域的高转速测量要求。由于YD69可给出具有一定相位差的两种转速信号,因此可进行正反转判别。安装方便,与测齿轮不接触,无磨损,输出波形为方波,占空比约为50%;测速范围宽,温度适应广,抗振性强,有电源极性保护和输出短路保护。
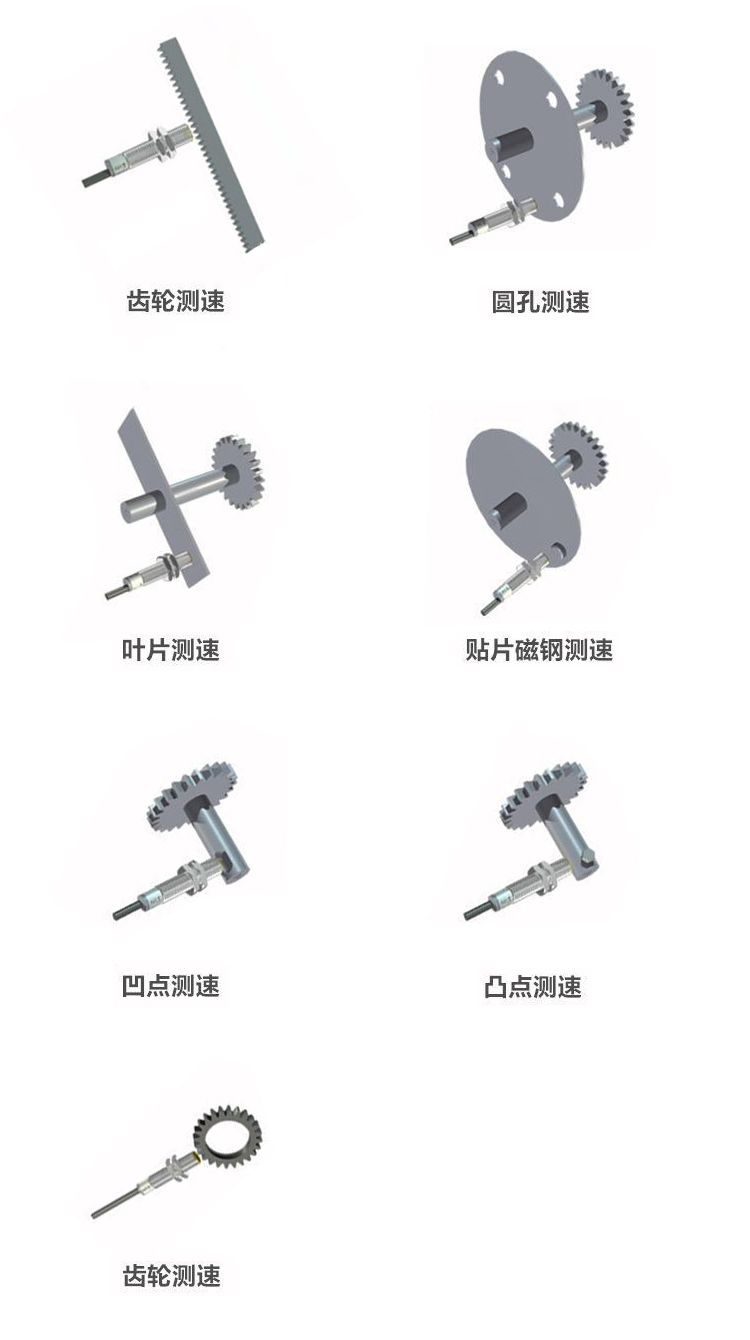
1.传感器安装
● 被测感应体为导磁体,上有齿或凹槽。
建议:测速齿轮 模数≥1.7,材料为导磁低碳钢
注:非标齿或槽与平整面宽度不等将导致波形占宽比的变化。
● 安装间隙:0.5-2mm,典型值为1.0mm
注:取决于被测件的振动情况
2.传感器输出特性
● 频响特性:0~20kHz
● 输出通道数:双通道
● 输出波形:方波,上升、下降沿时间 12μs±40%
● 输出幅度:高电平:U-0.7(U:电源电压),低电平:< 0.1V
● 脉冲占空比:50%±25%
● 相位差: 90±30°(第一通道超前)
注:取决于安装方式,旋转件的旋转方向,本参数适用于本说明书图四举例的安装方式
● 负载能力: ±20mA (适合大)
● 输出阻抗:<47Ω
● 供电电压:Ub=+24VDC(5V~26V)
● 功耗电流:≤35mA
● 工作温度:-40℃~+125℃
● 耐振性能:振动(10Hz~2KHz)30g,冲击100g
● 密封性: IP68
● 电源极性保护:有
● 输出短路保护:有
● 绝缘强度:1000V 50Hz,1min(通道与外壳)
● 外壳材料:不锈钢304(可按用户要求改用其他材料)
1.转速测量原理
当测速齿轮旋转时,传感器将产生频率f(Hz)= n×m/60(n为转速,P为齿轮齿数)的方波信号,供机车电子控制系统对机车速度、柴油机转速、进行采样检测。
感应体必须是导磁体,可以是凹槽,也可以是凸起的螺钉或齿轮。
应用本传感器测量转速,涉及到以下几个参数:
m—被测旋转导磁体上感应体的个数
n—转速
f—输入信号频率
s—设定的仪表系数(依转速测量仪表特性而定,部分转速测量仪表直接设定齿数,请依照选用的转速测量仪表使用说明书选定仪表系数)
其关系如下: S=
n = s f = 60 f / m
定好一个测量系统的感应体个数以后,仪表设定系数就已确定好,根据每一通道的传感器所对的感应体个数确定好各通道的系数。
例如,对一个旋转轴进行转速测量,轴上有一个30齿音轮,相当于感应体齿 数 Z = 30 ,那么传感器每通道输出的频率为 f = (30/60)n,转速 n = 2f,即测出的频率数要乘以2才等于实际转速。将转速测量仪器系数设定在2 ,即s = 2 ,那就可以直接显示转子的实际转速。同样,如果每转产生2个信号,则设系数 s = 30 即可,其余类推。
3.正反转判别测量原理
应用霍尔双通道传感器可方便的进行正反转判别。
按 本说明书四中应用示例安装,当旋转方向如图四所示定义为正转,输出波形为通道1超前通道2 90度,波形示意图如下所示:
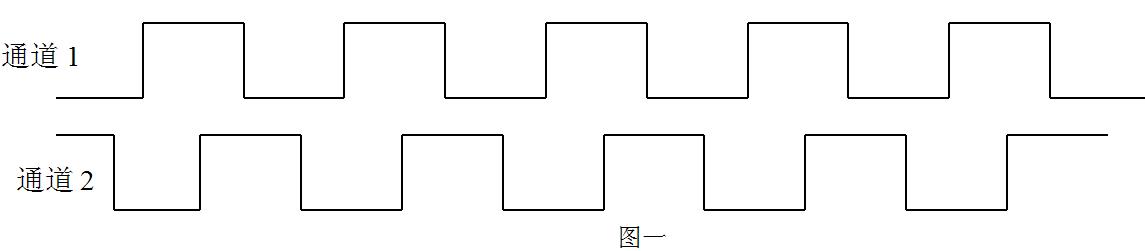
当旋转方向与图四 所示方向相反时,通道2波形将超前通道1波形90度,波形示意图如下所示:
由上图可知,对通道1、2的波形进行相位鉴别,即可进行正反转判别。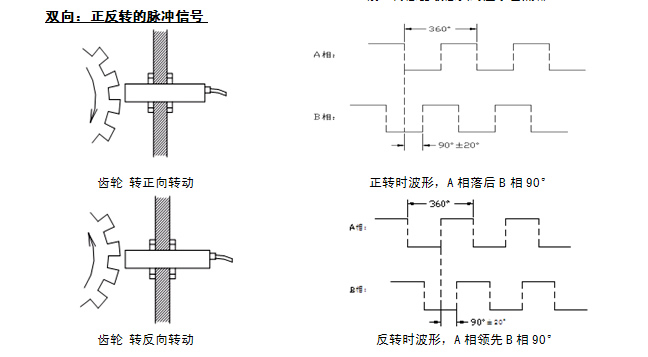














咨询热线(Tel):025-66075066
售后电话(Tel):025-66018619











