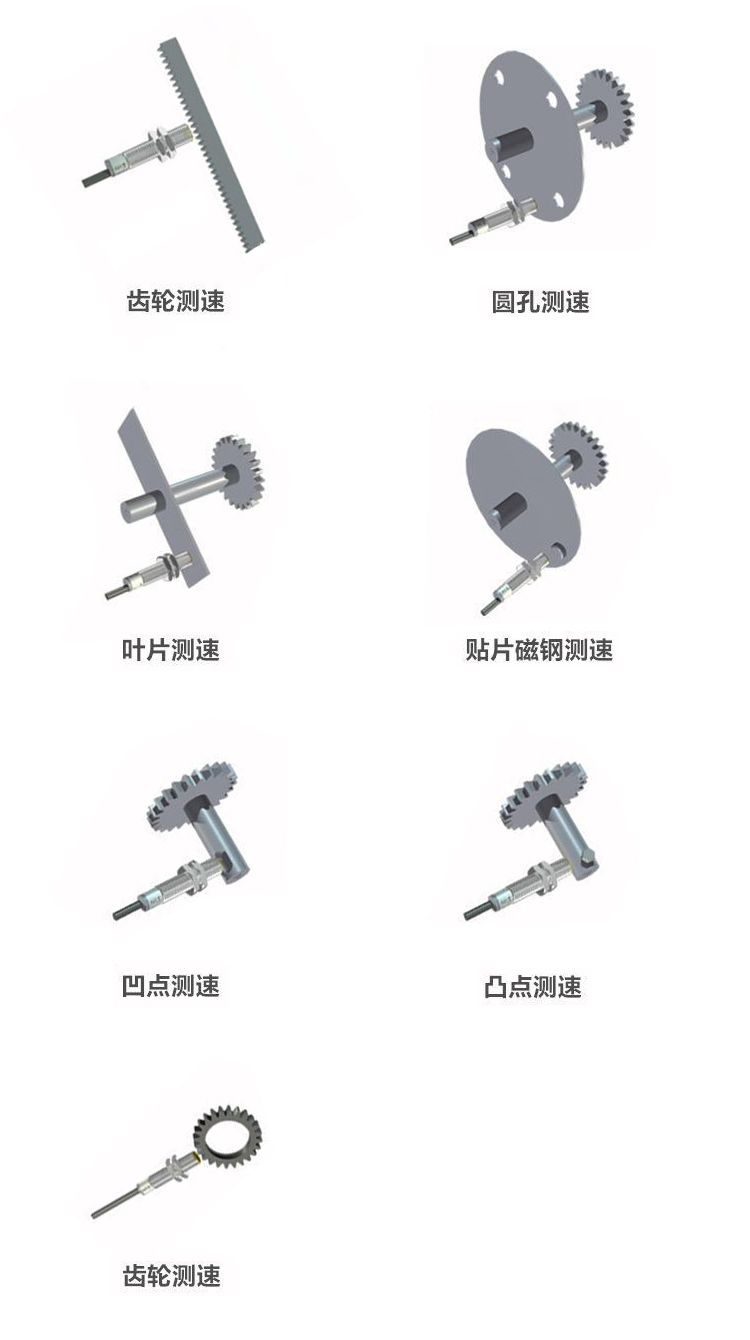
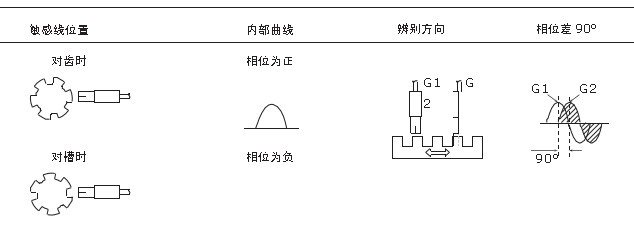
ส่วนประกอบหลักของเซ็นเซอร์ความเร็วเกียร์ KAIKIT คือการใช้ตัวต้านทานแม่เหล็กเป็นองค์ประกอบในการตรวจจับ,หลังจากวงจรประมวลผลสัญญาณใหม่เอี่ยมเพื่อลดเสียงรบกวน,ฟังก์ชั่นที่สมบูรณ์แบบมากขึ้น。โดยการเปรียบเทียบรูปคลื่นเอาต์พุตกับเซ็นเซอร์ความเร็วฟันประเภทอื่น ๆ,ข้อผิดพลาดน้อยมากของความเร็วในการหมุนที่วัดได้และคุณสมบัติเชิงเส้นมีความสอดคล้องที่ดี.วัตถุเหนี่ยวนำเป็นวัสดุแม่เหล็กหรือวัสดุนำทางแม่เหล็ก,เช่นเหล็กแม่เหล็ก、เหล็กและเหล็กไฟฟ้า ฯลฯ。เมื่อตรวจพบมีรอยเฉี่ยวชน(หรือเว้า)วัสดุแม่เหล็กหรือคู่มือแม่เหล็ก,ขณะที่วัตถุที่วัดได้หมุนไป,เซ็นเซอร์ส่งสัญญาณพัลส์ที่เกี่ยวข้องกับความถี่การหมุน,เพื่อให้บรรลุวัตถุประสงค์ของการสื่อสารในการตรวจจับความเร็วหรือการเคลื่อนที่。

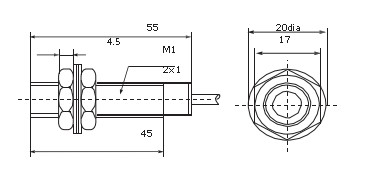
| ระยะตรวจจับ | 2-3mm |
| แบบฟอร์มการส่งออก | NPN/PNP ระบุอัตโนมัติ |
| กระแสไฟขาออก | 50mA |
| แรงดันใช้งาน | 12-30VDC |
| ความแม่นยำในการวัด | ±หนึ่งชีพจร |
| การบริโภคปัจจุบัน | ≤15mA |
| ความถี่ในการตอบสนอง | 0Hz~33KHz |
| โมดูลัสที่ใช้บังคับ | ช่องว่างของฟัน≥3mm |
| อุณหภูมิแวดล้อม | - 2 5℃~ 7 0℃ |

◇เนื่องจากภายในเซ็นเซอร์มีแม่เหล็กถาวร,ควรติดตั้งด้วยความระมัดระวังเพื่อหลีกเลี่ยงการกระแทกระหว่างเกียร์และหัวเซ็นเซอร์เนื่องจากการดึงดูด,ขณะที่ทำให้เซ็นเซอร์ได้รับความเสียหาย。
◇หากสัญญาณรบกวนแม่เหล็กไฟฟ้าโดยรอบมีขนาดใหญ่,แนะนำให้เพิ่มสายป้องกัน,นั่นคือสายดินที่อยู่อาศัย。

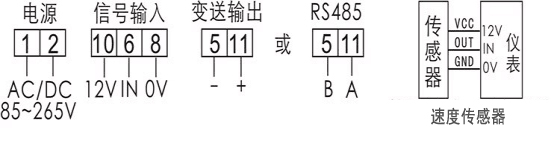
●35mmวิธีการติดตั้งรางมาตรฐาน;
●สัญญาณอินพุต:สวิตช์ฮอลล์,สวิตช์ความใกล้เคียง,สวิทช์ตาแมว,เข้ารหัส ฯลฯ
●เอาท์พุทเครื่องส่งสัญญาณDC12Vป้อนพลังงานให้กับเซ็นเซอร์,ไม่ต้องใช้แหล่งจ่ายไฟเซ็นเซอร์เพิ่มเติม;
●ผลลัพธ์DC4-20mA,0-20mA,0-5Vรอ,ค่าความเร็วในการหมุนเป็นสัดส่วนโดยตรงกับสัญญาณเอาต์พุต,ค่าความเร็วในการหมุนและสัญญาณเอาต์พุตที่สอดคล้องกันตามความต้องการของผู้ใช้ก่อนออกจากโรงงาน。ตัวอย่างเช่น:การตั้งค่า0-3000rpmสอดคล้องกัน4-20mA,เมื่อผู้ใช้วัดสัญญาณเอาต์พุตตัวแปรคือ8mA,แล้วความเร็วในการหมุนที่สอดคล้องกันคือ750rpm
●RS485เอาท์พุทอินเทอร์เฟซ,ใช้มาตรฐานmodbus-rtuข้อตกลง,สามารถใช้ร่วมกับPLC,หน้าจอสัมผัส,เครือข่ายกลุ่มเช่นซอฟต์แวร์การจัดกลุ่ม。ที่อยู่มิเตอร์,อัตราการรับส่งข้อมูลการสื่อสาร,โรงงานบิตพาริตี้สามารถตั้งค่าได้ตามความต้องการของผู้ใช้,หลังจากออกจากโรงงาน,ผู้ใช้สามารถตั้งค่าได้ด้วยตัวเองด้วยซอฟต์แวร์บนคอมพิวเตอร์ของเรา。
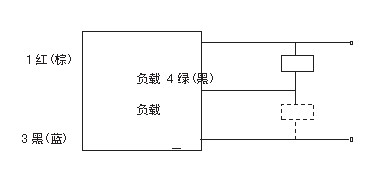
●แผนภาพการเดินสาย: